南寮開放場域實踐安全的車道變換
摘要:車道變換是一種具有潛在風險的駕駛行為之一,必須能根據周遭的車輛判斷車道變換的時機並且規劃能執行且平順的車道變換路徑,如果車道變換的判斷或操作不恰當,就會引起本車和目標車道上的後車之間的碰撞。因此如何進行安全且平順的車道變換為一個重要課題。本文以南寮開放場域中以自主駕駛車進行車道變換的實踐經驗介紹車道變換的決策和控制。
Abstract:A lane change maneuver is one of the potentially risky driving behaviors. It is important to be able to judge the timing of lane changing based on the surrounding traffic and to plan a smooth lane change path that can be executed. If the risk evaluation or operation for performing lane changing is inappropriate, a collision between an ego vehicle and the rear vehicle in a target lane may occur. Therefore, how to perform safe and smooth lane change is one of the important issues. This article describes the lane change decision and control in our autonomous vehicles operated in the NanLiao open fields.
關鍵詞:自動駕駛車、車道變換決策和控制、車道變換風險評估
Keywords:Autonomous vehicle, Lane change decision and control, Lane change risk evaluation
前言
隨著科技的發展,自主駕駛技術的能力也不斷地的提升,過去的科幻影集霹靂遊俠中那台能自己行駛的霹靂車也逐漸成形,它不再是遙不可及的夢想,它已經是移動革命的進行式,自主駕駛將提供人們更安全的行駛環境,並從疲憊的駕駛中得到解放。目前許多公司相繼投入許多資源在其中,從現在的新車輛中也可以發現有些車已經配備了能自動調整與前車距離和車速的適應性巡航控制系統、能避免車道偏離的車道維持系統和能緊急避免碰撞的自動緊急煞車系統等主動式安全系統。這類輔助系統主要是協助駕駛避免可能的危險或減輕駕駛的負擔,但這些輔助系統只能適用特定情境和場域,例如在高速公路上或者只能操作在特定的速度範圍。現在許多車廠、新創公司、資訊產業正努力朝完全自主駕駛前進,讓自主駕駛系統能夠處理各式各樣複雜的交通情境和駕駛任務,將車子完全交由電腦進行駕駛,不需要車內的人去駕駛車輛。在各樣的駕駛任務中,變換車道是其中一種具有風險性的駕駛行為,據研究統計[1]危險的車道變換所造成的事故占了總交通事故的5%。根據台灣2020年交通事故統計[2],因駕駛人因素造成人員當場或 24 小時內死亡的事故原因中,轉彎(向)不當為第四大主要肇事原因,轉彎(向)不當包含了變換車道或轉向不當、左轉彎未依規定、右轉彎未依規定及迴轉時未依規定。不適當的車道變換會影響本車和在目標車道上的車輛之間的安全,並可能導致兩車的相撞或者使得後方車輛緊急煞車。工研院機械所在南寮的開放場域測試中累積了許多自駕能量,本文以車道變換為主題闡述車道變換包含了車道變換的決策流程、評估車道變換風險的方式以及如何執行車道變換。
車道變換決策
1.車道變換行為決策流程
車道變換的行為決策流程如圖1。首先自駕車會根據現在的位置、語意地圖提供的車道資訊之連接關係以及周圍環境資訊判斷是否需要進行車道變換。例如最常需要變換車道的情形會發生在準備要左轉的路口前本車在右邊車道或者是在右轉的路口前本車在左車道,以及接近導航路徑(navigation path)的終點前本車在內車道,如圖2所示。當導航路徑(navigation path)需要在下一個路口左轉,如果車輛所在的右車道不允許左轉時,則語意地圖中右邊車道就不會有路口左轉的航點(waypoints),使得在全局路徑(global path)中只會連接到在路口前,不會有下一條車道資訊,此時自駕車必須要在轉彎路口前進行車道變換才會有下一條路徑可以走。或者是,當自駕車在接近導航路徑的終點時,如果自駕車還在內車道時,則必須在抵達終點前變換車道至外車道上,方便抵達終點時的停車。前面幾種都屬於基於交通規則的車道變換,較有強制性,因此會根據語意地圖的資訊決定最後的車道變換點,如果目標車道上沒有足夠的安全距離時,則靠近最後的車道變換點時車子會減速至最後車道變換點前停止,並等待車道變換的機會。另一種則是屬於選擇性的車道變換,考量到鄰近車道車流速度比現在車道的車流速度較快時進行車道變換的行為,其目的是為了縮減行駛時間並提高車流的效率。
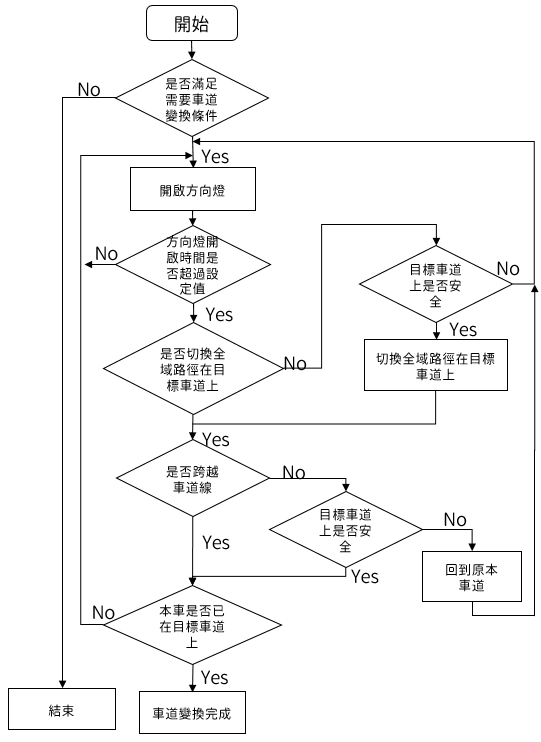
圖1 車道變換決策流程圖
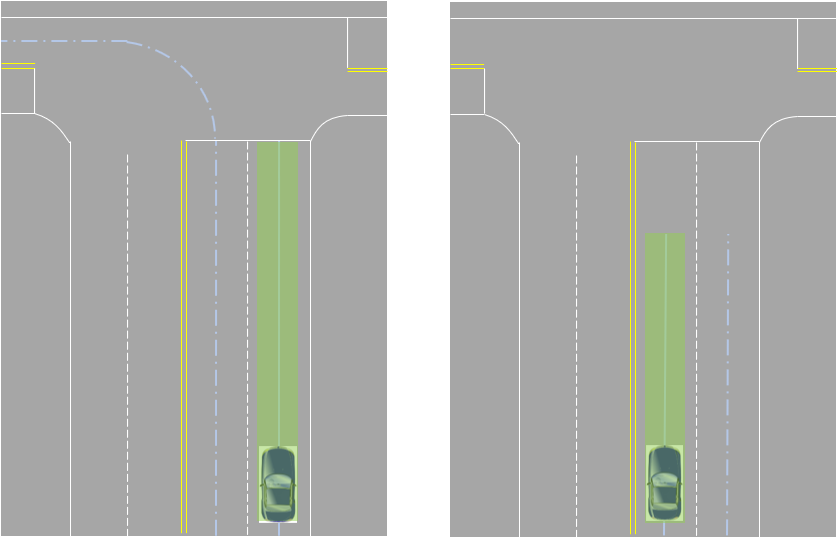
(a) (b)
圖2 需要車道變換的情境示意圖 (a) 在準備要左轉的路口前本車在右邊車道 (b) 在接近導航路徑的終點前本車在內車道
…本文未結束
更完整的內容 歡迎訂購 2021年4月號 457期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購