高效能無人機行動地面站系統開發
摘要:傳統無人機行動地面站除了在功能方面須具備數據鏈路及圖傳鏈路資訊顯示、飛行器操控及各類酬載獨立控制等基本功能外,更希望能達到體積小,重量輕,功耗低,容易移動的要求。因此在專業操作需要專門針對快速佈建、即時化、高精度、小型化、強固化等目標地面站,來滿足各式無人機操作時各類要求。尤其近年來無人機功能日益強大,所攜帶的各類酬載(探測器)越多,地面站需同時提供無人機控制、無人機姿態顯示、GPS地理資訊顯示、影像顯示及結合邊緣運算視覺辨識分析技術、供特定酬載資訊顯示等。資訊地面站顯示已相當飽和,更超過傳統單銀幕地面站單純控制及飛控顯示功能設計。因此本研究主要在探討高效能銀幕無人機行動地面站系統的系統需求,並實際設計及驗證相關產品的製作與開發。
Abstract:In addition to basic functions such as data link, image transmission link, aircraft control, and independent control of optional payloads, traditional UAV mobile ground control stations are also required to be small size, light weight, and have low power consumption and also to be highly mobile. Therefore, operations need to meet various requirements for rapid deployment, real-time, high-precision, miniaturization, and robustness. Especially in recent years, drones have become more functional, and various payloads are carried on board. The ground station needs to provide multiple functions such as drone control, drone attitude display, GPS geographic information display, image display, and combined with edge computing visual identification image analysis technology for specific payload information display, etc. The display of the information ground station is quite unable to meet such needs. Therefore, this research mainly discusses the system requirements of the high-performance screen UAV mobile ground station system, and implements the design and verification of the production and development of related products.
關鍵詞:無人機、地面站、飛行模擬、邊緣運算視覺辨識
Keywords:Unmanned aerial vehicle, Ground control station, Fly simulation, Edge computing visual identification
前言
傳統無人機專用行動地面站系統,主要為控制電腦及顯示單元兩個主要組件。控制電腦執行地面站操作程式,做為地面站導航命令設定及資料計算,而顯示單元則同步顯示及監控各項飛機即時資訊。以台灣目前ICT產業而言十分發達,每年產值高達數十億美元,但是較少針對專業級無人機地面站操作需求,提供便利的行動地面站產品。當然一方面有可能是研發公司對無人機地面站市場需求調查不足,另一方面是相關開發人員對相關的飛行操作需求了解有限,無法針對專業用需求開發產品。
由於研究團隊先前曾參與交通部民航局合作案,運用八旋翼無人飛機取代有人飛測機於松山機場進行ILS儀降系統訊號校正[1],如圖1。後續並結合此測試經驗與國內廠商慶旺科技合作專業用多銀幕地面站雛型系統開發,並在2017台北國際航太展展出,因此對如何提供一組高效能的行動地面站供無人機使用,深感興趣。因此本文在探討無人機應用所需要地面站、主要研究「高效能無人機行動地面站」系統開發,以提高工作時效且降低成本。
文獻回顧與探討
有關無人機地面站軟硬體功能需求敘述如下:
1.無人機地面站軟體功能架構:[2]
指揮控制與任務規劃是無人機地面站的主要功能,無人機地面站系統的功能通常要能滿足指揮調度、任務規劃、操作控制、顯示記錄等四項主要功能。
(1)指揮調度功能主要包括上級指令接受、系統之間聯絡、系統內部調度。
(2)任務規劃功能主要包括飛行航路規劃與更新規劃、任務酬載工作規劃與更新規劃。
(3)操作控制功能主要包括起降操縱、飛行控制操作、任務酬載操作、數據鏈控制。
(4)顯示記錄功能主要包括飛行狀態參數顯示與記錄。航跡顯示與記錄。任務酬載信息顯示與記錄。
以一般常用Mission Planner地面站控制軟體為例,無人機的飛控電腦藉由數據傳輸器傳送機身本身傾斜角度、空速、前進方向、爬升速率以及坐標等飛航資訊至地面站的接收器。經由地面站的電腦可立即監視無人機姿態、飛行高度、GPS信號、電池電量、目前位置、及航點設定等,達到無人機狀態監控,同時整合攝影機影像傳輸做即時影像同步追蹤目標物。地面站軟體除負責顯示飛航資訊外,亦將載具之飛行軌跡及現在位置,顯示在以GoogleMap等服務為地圖來源之視窗上,如圖2。使用者亦可透過軟體介面進行導航點設定等操作,達到全自動飛行,亦可透過地面站搖桿控制調整拍攝範圍為正前方至正下方內任何角度,使航拍時取景鎖定目標物更為方便辨識。

圖1 多銀幕地面站雛型系統
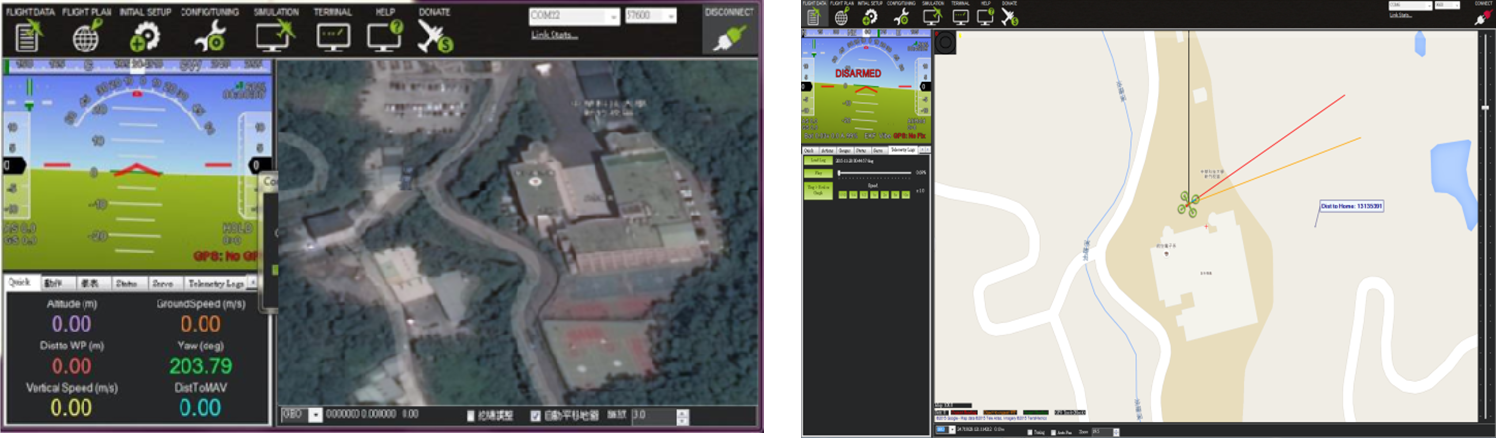
多旋翼機姿態及目前位置(衛星圖) 多旋翼機位置圖
圖2 Mission Planner飛控軟體
…本文未結束
更完整的內容 歡迎訂購 2021年7月號 460期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購