機械手臂動態精度提升技術
摘要:隨著工業自動化的逐漸普及,製造業者為了因應市場的競爭,勢必往高附加價值產品的加工生產努力,因此具有高製造彈性的機械手臂其加工精度就成為非常關鍵的部分。傳統關節式機械手臂雖然有很好的重現性,但是受到本身機構誤差的影響,很難有良好的準確性。除了準確性外,動態精度也就是即時的軌跡追蹤精度,更與加工品質和產能直接相關。良好的動態精度能使機械手臂在高速的運動下製造高品質、複雜幾何的工件。本文採用一雙迴圈的疊代學習控制演算法來優化機械手臂在動態軌跡追蹤時的準確性與精密度,使絕對精度達0.2 mm,使機械手臂能夠應用在高精度製程。
Abstract:With the increasing popularity of industrial automation, manufacturers will inevitably make efforts to produce high value-added products in order to respond to market competition. Therefore, the tracking accuracy of robot manipulator featuring high configurability and flexibility, plays an essential role. Although the conventional robot manipulator has good repeatability, the kinematic accuracy often suffers from the error of mechanism. Aside from the kinematic accuracy, dynamic accuracy-- the ability to track a dynamic trajectory, is directly related to the workpiece quality and throughput. Good dynamic accuracy enables high product quality under high speed and complex scenario. In this paper, a dual loop iterative learning control algorithm is used to optimize the kinematic accuracy, and the dynamic accuracy of the robot manipulator with the maximum absolute error less than 0.2 mm. The controlled robot manipulator can be applied to high precision manufacturing processes.
關鍵詞:疊代學習控制、軌跡追蹤、動態精度
Keywords:Iterative learning control, Trajectory tracking, Dynamic accuracy
前言
機械手臂在自動化的應用一般是透過人工教點的方式讓機械手臂記憶自己該走的路徑,對於單純的上下料應用基本上是輕鬆勝任,但是對於複雜的加工應用,像是汽車產業的鈑金切割與車體焊接等,這對於人工教點是非常困難且耗時的工作。解決的方法有兩種,第一種是可以使用市售的CAD/CAM離線編程軟體產生路徑,像是Robotmaster [1]、RoboDK [2]等,第二種是搭配導引裝置產生路徑,像是ABB SRP [3],本身工研院也有開發導引路徑的解決方案,詳細的介紹可以參考文獻[4]。
不論是用離線編程軟體或是導引裝置產生的路徑,都將考驗到機械手臂的軌跡追蹤能力,意即動態精度的高低,本文的重點將闡述使用疊代學習控制的方法來提升動態精度,會分成以下章節來介紹,分別是疊代學習控制介紹、疊代學習控制系統設計、疊代學習控制校正結果與結論。
疊代學習控制介紹
在介紹疊代學習控制之前,我們先複習一下基本控制設計在解決什麼問題,圖1展示了一個非常典型的回授控制系統方塊圖,對於一個需要被控制的系統(受控廠),我們需要設計一個控制器去滿足暫態與穩態響應的規格,該迴授控制法的閉迴路頻寬受到水床效應(waterbed effect)的影響有其侷限。回顧工業量產中的應用,其經常有同樣工序需要重複執行的特性。利用這種特性,若控制法能夠將過去的經驗(加工誤差)用以修正後續的操作,這種疊代的前饋控制法將可以大幅提升加工精度而不受限於閉迴路控制的先天限制。我們稱此控制理論為疊代學習控制(Iterative Learning Control, ILC),並將其應用到機械手臂的軌跡追蹤。
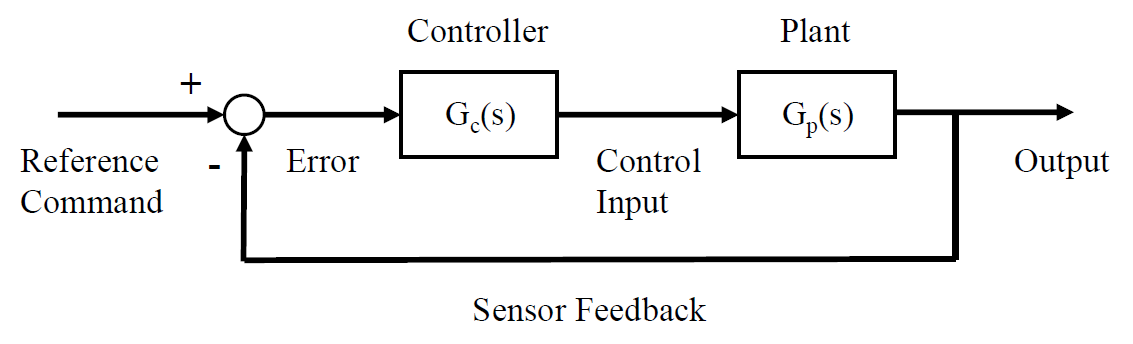
圖1 回授控制系統方塊圖
疊代學習控制是將系統重複執行多次相同的動作,透過學習修正先前的誤差來達成最終的任務,舉例來說,一位打高爾夫球的選手,在一固定位置要把球打進一固定洞裡,選手一定是藉由每次揮桿的結果來修正下一次揮桿的角度與力道等因素,來達成把球打進洞裡的任務。接下來我們參考文獻[5]的部分內容來介紹疊代學習控制的理論內容,首先我們先考慮一個單純的線性非時變單輸入單輸出系統(Linear Time-Invariant SISO system),它的狀態方程式可由式(1)(2)來表示,其中i為iteration index,k為time index。
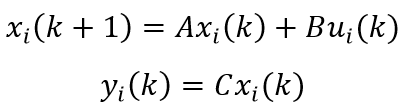 (1) (2)
(1) (2)
接下來將式(1)代入式(2)透過z-transform來做整理,同時假設每次疊代的初始條件都相同,意即 xi (0)=x0對於所有的i都成立,就可以得到式(3),再簡化表示成式(4),其中z為time-shift operator,可將time index往後一個時刻,例如 zxi (k)≜xi (k+1),而 P(z) 為受控廠,d(z) 為重複性激發擾動。一般通用的ILC控制器可表示成式(5),其中 Q(z) 為低通濾波器(Low pass filter),L(z) 為學習濾波器(Learning filter),ei (k) 為追蹤誤差,整個疊代學習控制系統的方塊圖由圖2所示。
 (3) (4)
(3) (4)
 (5)
(5)
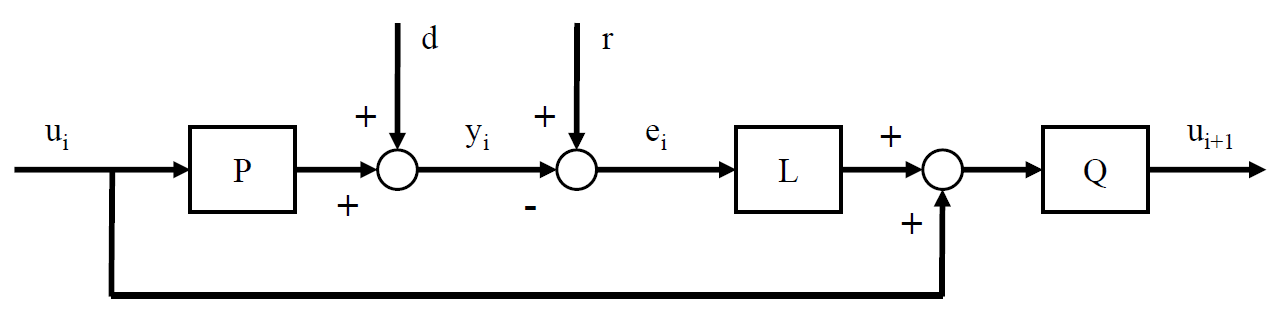
圖2 疊代學習控制系統方塊圖
…本文未結束
更完整的內容 歡迎訂購 2021年8月號 461期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購