自駕物流車於市區運行的挑戰
摘要:為解決物流業者在產業上面臨的職業司機招聘不易、倉儲土地取得成本過高以及運輸安全等議題,在新竹物流公司、新竹市政府以及工研院機械所的共同合作下,團隊於2021年7月申請通過無人載具科技創新實驗計畫,並於同年10月核備上路。本計畫係以產業痛點出發,在新竹市市區的新竹物流營業所間,以工研院機械所提供的自駕物流車協助物流營運業者驗證自駕物流服務的可行性,推動臺灣自主研發之自駕物流運輸服務在開放式混流場域實際落地。
Abstract:In order to solve the pain points faced by the logistics operators, such as the difficulty of recruiting professional drivers, the high cost of warehousing acquisition and transportation safety, the team, which is established by HCT Logistics Company, Hsinchu City Government and the Mechanical and Mechatronics System Research Labs (MMSL) of Industrial Technology Research Institute (ITRI), applied for and passed the Unmanned Vehicles Technology Innovative Experimentation Program in July 2021, and was approved to start tests in public road in October of the same year. Starting from the pain points of the logistics operators, this program uses the self-driving logistics vehicles provided by MMSL to assist logistics operators to verify the feasibility of self-driving logistics services operated between two logistics offices of HCT in the downtown of Hsinchu City, and promote the implementation of self-driving logistics services and transportation, which is independently developed by Taiwan, in the public road with mixed traffic flow.
關鍵詞:自駕物流車、市區運行、混合車流
Keywords:Self-driving logistics vehicle, Operation in downtown, Mixed traffic flow
前言
隨著電子商務的蓬勃發展,物流運輸在電商平台與實體貨物中扮演重要樞紐的角色,電子商務的快速成長,帶動全球物流運輸需求持續增加。在物流產業的龐大需求下,可望加速驅動自駕技術於物流業的落地實現與商業應用。國際間已發展自駕物流服務主要有長途/高速/高運量之自駕貨卡車隊,標竿廠商如TuSimple[1]、Waymo[2]、Aurora[3]、Kodiak[4]之自駕物流車,目前已於公共道路運行測試。並有中短程/中低速/中低運量之自駕物流車配送服務,標竿廠如 Waymo的 Pacifica自駕小型貨車,目前已與UPS合作進行自駕貨運試點計畫,以及Gatik[5]運用Ford Transit為平台,在北美地區配送Walmart及Loblaws販售之商品,並預計與日本貨卡車製造商ISUZU合作導入貨車平台開發自駕物流車。
臺灣的市區交通環境具有車種多元且機慢車混流等特性,而國內物流業者常需在市區巷弄間進行宅配服務,因此相較於國際廠商運行場域,國內發展之自駕物流技術更需著重在與運行環境中的行人、機慢車以及路口匯流車輛互動。
挑戰
本計畫實施場域選定於新竹大潤發忠孝店周邊連接兩個新竹物流營業所的市區道路。此場域同時兼具車流量大與車流量小的路段、不同寬度的道路、必須匯合進陸橋下橋處的路口、從營業所出口離開匯合進一般道路、經過大潤發出口以及沿路大大小小的有號誌/無號誌的十字路口/T字路口,結合此地豐富的人車互動使自駕車能在此有限場域測試到多數市區道路交通情境。
工研院自駕車使用從光達、相機與動態感測模組等多種感測器取得的感知融合資訊結合高精圖資與物體追蹤技術,能做到高精度定位、紅綠燈識別並得到環境中物體(行人、機慢車及汽車)的位置、速度與預測軌跡。綜合以上資訊,決策模組能依此評估碰撞風險,再考量交通法規與民情後,執行適當的減速或修正軌跡進行轉向閃避。
1.實驗運行場域
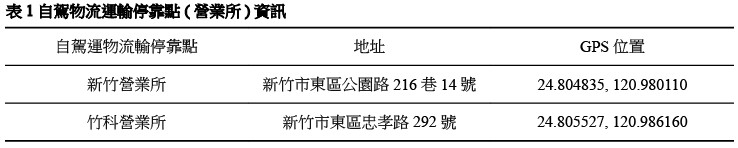
圖1為自駕物流運輸服務於兩間營業所間倉儲外點到點的行駛路線,路線出發點兩端為新竹物流公司位於新竹市東區的「新竹營業所」及「竹科營業所」,全程約2公里。運行路線主要行經公園路、八德路、東光路及忠孝路等,並規劃於新竹物流營業所設置車輛營運整備間,以進行兩營業站點間的貨物配送試運行。表1則提供自駕物流運輸停靠點的營業所名稱、地址及GPS資訊。
2. 運行場域情境盤點
執行團隊在兩營業所間的貨物配送運行路線進行運行場域情境盤點,結果包含:「無號誌路口轉向遇來車衝出」、「無號誌路口直行遇橫向來車/行人」、「遭遇路邊臨停車輛」、「對向會車」、「遇他車行駛」、「機慢車混流行駛」、「有號誌路口直行/停等」、「有號誌路口右轉/停等」、「有號誌路口左轉/停等」、「靠左匯入車道」、「站點停靠/自動停車」及「遇夜間號誌閃光」等12種主要實驗運行情境,個別情境盤點如表2至表3。

圖1 實驗運行場域路線
…本文未結束
更完整的內容 歡迎訂購 2022年4月號 469期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購