無人機直流無刷馬達無感測器驅動開發及測試
摘要:本文為開發大功率無人機馬達(42極4kw外轉子BLDC)應用之驅動系統,搭配以六步方波PWM無感測器驅動之演算法,使得馬達順利在空載及滿載的情形下,由Duty 0加速至100 %而不出現失步的情形,並試圖將其運用在工研院機械所開發之商用無人機上。本文主要分為四個階段:(1)建置實驗平台(2)無感測器演算法撰寫(3)空載Duty 0-100 %加速測試 (4)滿載(40吋扇葉) Duty 0-100 %加速測試。本測試改善文獻[1]所提出演算法之系統動態響應,並在實際的無人機上進行測試。針對Duty0~100 %不失步之目標,實際測試所開發之無感測器演算法,並針對無人機馬達運轉結果優化其演算法。
Abstract:The purpose of this article is to develop a driving system for the 42-pole 4kw outer rotor BLDC of high power drones. The driving system is based on the six-step trapezoidal wave Pulse-Width Modulation (PWM) sensorless algorithm, and the goal is to accelerate the motor from duty 0 to 100% without step lost under either no-load or full-load condition. Eventually, this driving system will be used on the commercial drones developed by the Industrial Technology Research Institute (ITRI). This article includes four parts: (1) Set up the experimental platform; (2) Develop the sensorless driving algorithm; (3) Perform the no-load acceleration testing (duty 0~100%); (4) Perform the full-load (40 inch blade) acceleration testing (duty 0~100%).
關鍵詞:直流無刷馬達、無位置感測器控制、脈衝寬度調變
Keywords:BLDC, Sensorless control, PWM
前言
多旋翼無人機(Multi-axis Drone)在近幾年隨著微控制器與馬達控制的技術提升而逐漸普及,現今已被廣泛運用在各類型的任務當中,舉凡民用的空拍用小型無人機、農用的中大型植保無人機乃至於軍用的大型無人機等。中大型的無人機馬達規格通常為2 kw~20 kw的直流無刷馬達(Brushless Direct Circuit motor, BLDC),而受限於電池電量的限制,無人機馬達的效率也因此格外重要。
本文著重於驗證4 kw BLDC在空載及滿載的狀況下,應用先前所開發的無感測器轉子位置估測馬達控制演算法,進行Duty 0-100 %加速測試。
實驗平台建置
1.設計概念
本平台係用於測試40吋扇葉之4 kw BLDC應用無感測器演算法所能產生的推力大小,並盡可能降低平台在馬達軸向的截面積,以減少平台結構對扇葉流場的影響,使實驗結果更貼近真實應用情形。本平台使用鋁擠型作為主結構支架,並將馬達安裝於直線滑軌上,確保馬達有軸向自由度,再利用鋁板件連接馬達座及懸臂樑式荷重元(load cell),以測量馬達扇葉輸出之推力大小,如圖1所示。
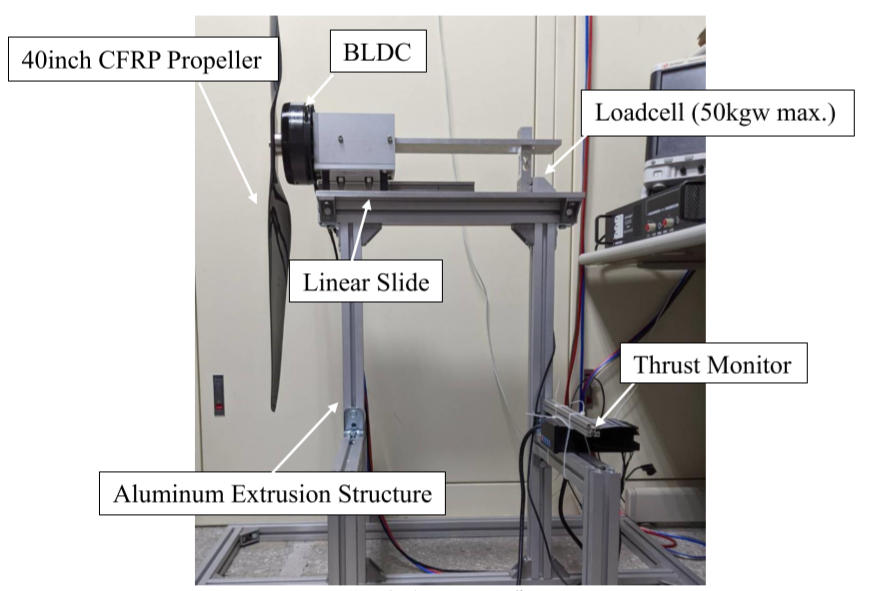
圖1 實驗平台示意圖
無感測器驅動演算法
1.無感測器驅動方式
本文提出一基於反電動勢估測的無位置感測器估測方式,由於反電動勢可用式(1)來代表:
 (1)
(1)
其中Ean為反電動勢,λpm為磁通,ωe=2πfe 為轉子角速度,α β為隨不同馬達設計而改變的參數,不過都小於1。在高速時這些高次項都可忽略,因此我們可以使用基頻來作為轉子角度估測之方法。圖2為此估測演算法之流程圖,其中我們需要量測相電壓與電流,藉由式(2)
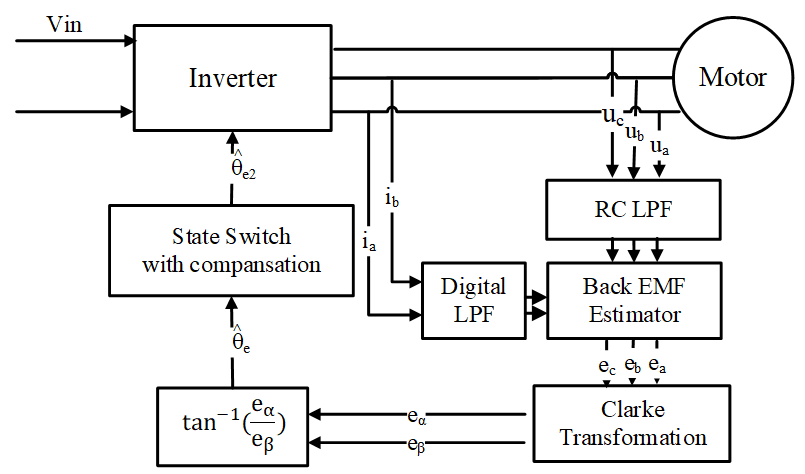
圖2 提出之反電動勢無感測器演算法流程圖
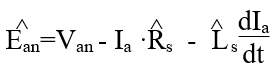 (2)
(2)
可計算出估測的反電動勢。需要注意的是由於電壓量測會經過一低通濾波器,為了滿足與電壓有相同相位,電流訊號在量測後也需通過一相同頻寬之數位濾波器。再來經過座標轉換,即可利用反正切函數並加上因為濾波器而落後的角度,算出估測之轉子位置[1]。
2.LPF相位補償
六步方波擁有可以直接藉由端電壓量測即可直接量測反電動勢之特性,在本驅動系統中使用電阻分壓與電容濾波,移除因切換造成的PWM電壓訊號。但此RC濾波器亦會造成幅值衰減與相位落後,其中幅值對於無感測器之角度估測並不會有影響,但相位落後會造成角度估測的錯誤。所以需要知道RC濾波器所造成的相位落後並進行補償,而此落後角度θlag可藉由式(3)求得。另外由於本驅動系統採用數位控制器,因此亦須考慮數位取樣、計算所造成的1.5步落後(角頻率*0.036)。
 (3)
(3)
其中ω為角頻率,B為LPF頻寬。
…本文未結束
更完整的內容 歡迎訂購 2022年7月號 472期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購