應用於自動鑽孔攻牙機之內藏型永磁同步機之設計與分析
作者:
黃昌圳、丁家敏、張正敏、邱國麟、吳昱勳、彭昌明
刊登日期:2019/04/30
摘要:本文設計一台應用於自動鑽孔攻牙機之內藏型永磁同步電機,額定功率7.5 kW,額定轉速18,000 rpm,最高轉速24,000 rpm。首先配合攻牙機的尺寸與特性要求,選擇最合適的電機型式與槽極數,進行雛型設計,接著使用有限元素軟體進行電機的特性分析,再針對平均轉矩、轉矩漣波、與效率等三項使用模糊田口法結合有限元素分析作優化,最後完成組裝與測試。
Abstract:This paper is about designing an interior permanent magnet (IPM) synchronous motor used in automatic drilling and tapping machines. It has rated power of 7.5 kW, at a speed of 18,000 rpm. The maximum speed can reach 24,000 rpm. Based on the machine's size limitation and required performance, a suitable machine configuration and a slot-pole number are selected, and then the finite element software is used for analysis of the characteristics. To yield the desired performance, average torque, torque ripple and efficiency, the fuzzy-based Taguchi method coupled with the finite element method (FEM) analysis are used to refine the motor structure. Finally, the motor is constructed and tested.
關鍵詞:自動鑽孔攻牙機、永磁同步電機、模糊田口法
Keywords:Automatic drilling and tapping machines, Permanent magnet synchronous motor, Fuzzy-based Taguchi method
前言
多年來,由於感應機的結構堅固、維修少、與價位低等優點,因而被廣泛應用於工具機的驅動上[1],但因轉子所產生的高損失,降低了整體的效率與落後功因,故有逐漸被取代之趨勢。近年來,為了節能、滿足高效率、與高精度操作的需求,永磁電機儼然已成為一個不可或缺的選項,因為比起感應機,永磁電機具有更高的效率與功因[2]。
然而,在高轉速的運用上,永磁電機並非無缺點,例如:表面型的永磁電機(surface permanent magnet motors, SPM),貼在轉子鐵芯上的磁鐵,必須使用套管固定它,因而增加了轉子結構的複雜性[2],故本文採用內藏型永磁電機(Interior Permanent Magnet Motor, IPM),將磁鐵安裝在轉子鐵芯內,磁鐵形狀通常使用簡單的方型,這種形狀比起表面貼的圓弧型磁鐵便宜,也無須再使用其他零件固定[3], [4],然而它的最大問題是會出現較大的轉矩脈波,文獻上有許多解決之道[4]-[10],大致上不是應用適當的設計手段[4]-[6],[8]-[10],就是仰賴控制的技巧[7]-[8],雖然以控制技巧來降低轉矩脈波非常有效,但本文是專注在設計的考量上,並使用模糊田口法結合有限元素分析作優化。
在文獻上,有許優化的方法,其中田口法(Taguchi method)被證明對單一優化目標最有用的優化方法。田口法為一種實驗設計方法,是利用系統參數來完成優化設計的一種品質工程法,它能夠以較少的實驗次數找出目標之優化。然而,多數問題並非只是要求單一的優化目標,在多目標的優化中,各個優化目標間,難免有互相衝突的情形。本文中在完成雛型設計後,擬使用模糊田口法結合有限元素分析作優化,除了要降低轉矩脈波外,也擬提高平均轉矩與效率[11]-[14],最後完成組裝與測試。
初始設計
首先決定適當的槽極數[8]-[10],因槽極數對電機的輸出特性有著關鍵性的影響。本設計之電機操控之最高轉速達到24,000 rpm,必須考慮市購驅動器可達到之最高頻率限制,故極數不宜過多,在能達到輸出速度與轉矩需求下,選擇4極18槽,此時每相每極槽數為3/2,即分數槽繞組,通常分數繞組的設計在低頓轉矩、弱磁性能、效率及製程上皆有良好的性能表現。本設計採用銣鐵硼磁鐵(NdFeB),剩磁(Remanence, Br)為1.2 T,回復導磁率(Recoil Permeability, μrec)為1.05,以V字型埋入轉子鐵芯內,即所謂的內藏型,馬達初始設計剖面圖與詳細規格如圖1與表1所示。另外,馬達繞組設計詳細亦如圖1與表2所示,繞組因數達到0.945。
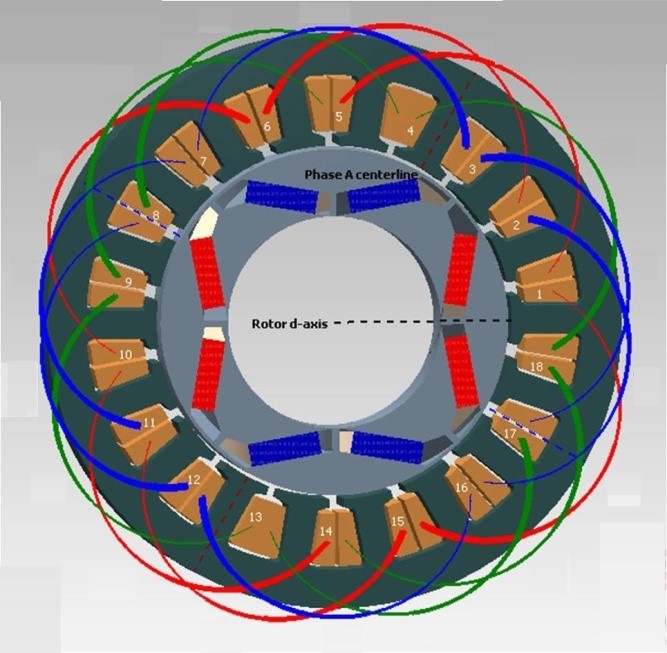
圖1 馬達初始設計剖面圖
表1 初始設計規格
|
規格
|
尺寸
|
規格
|
尺寸
|
|
定子外徑
|
81.0 mm
|
定子內徑
|
50.0 mm
|
|
槽深
|
10.0 mm
|
槽開口寬度
|
2.0 mm
|
|
齒靴角
|
15
|
齒間深度
|
0 mm
|
|
齒尖厚度
|
1.2 mm
|
齒寬
|
4 mm
|
|
底部圓角半徑
|
1.0 mm
|
底部圓角半徑
|
0.5 mm
|
|
積厚
|
80 mm
|
氣隙
|
0.5 mm
|
|
轉子外徑
|
49.0 mm
|
轉子內徑
|
30.0 mm
|
|
磁鐵方向
|
10°
|
磁鐵厚度
|
3.2 mm
|
|
磁鐵頂部間隙
|
4 mm
|
磁鐵寬度
|
10 mm
|
|
橋厚度
|
0.5 mm
|
橋寬度
|
5 mm
|
|
Post寬度
|
1 mm
|
腹板厚度
|
1 mm
|
|
磁鐵材質
|
38SH
|
矽鋼片材質
|
25CS1500
|
表2 電動機繞線配置表
|
A
相
|
線圈
|
去
|
回
|
B
相
|
線圈
|
去
|
回
|
C
相
|
線圈
|
去
|
回
|
|
1
|
1
|
5
|
1
|
4
|
8
|
1
|
7
|
11
|
|
2
|
2
|
6
|
2
|
5
|
9
|
2
|
8
|
12
|
|
3
|
10
|
6
|
3
|
13
|
9
|
3
|
16
|
12
|
|
4
|
10
|
14
|
4
|
13
|
17
|
4
|
16
|
2
|
|
5
|
11
|
15
|
5
|
14
|
18
|
5
|
17
|
3
|
|
6
|
1
|
15
|
6
|
4
|
18
|
6
|
7
|
3
|
模糊田口法優化
模糊田口法是在田口法中加入模糊邏輯理論,來找出最佳化的參數。一般田口法因為各因子間的交互影響,在執行多目標優化時會遇到參數的衝突問題,此時只能以影響程度來做權衡,選擇單一目標最佳化的參數,因而常無法得到真正優化的參數。
模糊田口法大致可分為四個步驟:建立田口法直交表(Orthogonal Array)、灰關聯分析、建立模糊邏輯理論與選定最佳化組合並驗證,以下將詳述模糊田口法之步驟。
1. 建立田口法直交表
選取四個控制因子A、B、C 及 D,相當於四個設計參數如圖2與表3所示,每一個因子具有三個水準(值),再將這些參數與水準值帶入直交表L9(34)如表4所示,利用有限元素法進行9次實驗,分別記錄每次實驗的平均轉矩(Tavg)、轉矩漣波(Trip)及效率(Eff)的分析結果,如表4所示。
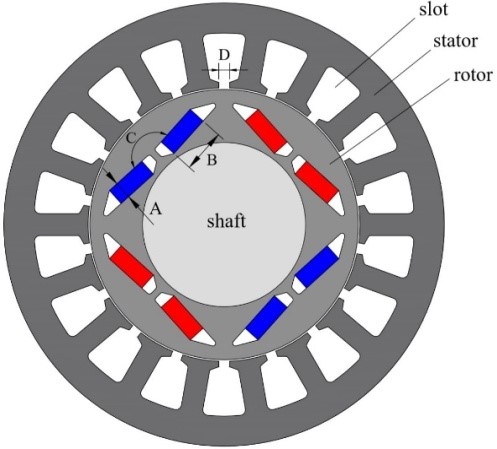
圖2 控制因子示意圖
表3 控制因子與其水準範圍
|
實驗因子
|
代號
|
水準一
|
水準二
|
水準三
|
|
磁鐵厚度 (mm)
|
A
|
3.1
|
3.2
|
3.3
|
|
磁鐵寬度 (mm)
|
B
|
7.6
|
8.0
|
8.4
|
|
V磁鐵展開角 (°E)
|
C
|
171
|
174
|
177
|
|
槽開口(mm)
|
D
|
1.8
|
2.0
|
2.2
|
…本文未結束
更完整的內容 歡迎訂購 2019年5月號 434期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購