自駕車系統安全設計驗證與診斷系統
摘要:一般民眾對於自駕車最大的疑問就是自駕車的安全性,這也是自駕車要落地營運的最大挑戰。工研院機械所作為全台最早進行自駕車開放道路實車運行的團隊,自駕車的安全性一直都是我們致力發展與確保的議題。為此,我們發展了三套自駕安全驗證與監控系統,包含(1)虛實整合模擬架構、(2)即時自駕系統診斷、(3)實車運行安全監控,分別在實車上路前與實車道路運行中進行全面性的自駕系統安全確保。
Abstract:Safety is one of the most important requirements for public road deployment of self-driving cars. As the first team in Taiwan to successfully demonstrate public road deployment, the ITRI MMSL self-driving car team places an extraordinary emphasis on ensuring the safety of our self-driving cars. Our approach to safety is three-pronged, consisting of (1) a cyber-physical simulation framework, (2) real-time software and hardware diagnostics, (3) and operational safety monitoring. Together, these multiple levels of checks, performed both before and during vehicle deployment, give us the confidence that our cars can reach its destination, both safely and autonomously.
關鍵詞:虛實整合模擬、即時診斷、運行安全監控
Keywords:Cyber-physical simulation , Real-time diagnostics , Operational safety monitoring
前言
保障車輛使用的安全性一直是汽車相關產業的最高原則。在汽車百年來的發展,安全技術從最初期的安全帶、安全囊等硬體技術研發到早期的防鎖死剎車系統(Anti-Lock Brake System, ABS)、車身動態穩定系統 (Electronic Stability Program, ESP)一直到近期各車廠陸續實車裝配的先進駕駛輔助系統(Advanced Driver Assistance Systems, ADAS)系統,顯見車輛安全相關技術一直都是汽車產業最重視與致力發展的重點。
自動駕駛技術相對於傳統汽車技術需要複雜的多方產業整合,除了傳統車輛製造技術外,X-by-wire線控技術、AI與深度學習高速運算平台、感測器、高精地圖、智慧交通基礎設施、高速車聯網等等,都是關鍵技術。在這麼多產業技術整合下,如何能夠監控與確保自動駕駛系統之安全性是自駕車實車上路運行前需嚴謹設計與實作的課題。本文將介紹工研院機械所自駕團隊在實車上路前的自駕車虛實整合安全驗證技術、自駕車軟硬體系統即時診斷系統以及自駕車運行安全監控系統,透過上述三個系統確保團隊自駕車在開放道路實車運行時的安全性與可靠性。
自駕車虛實整合安全驗證
自駕車已進入我們的日常生活圈,不僅要能工作正常,並且要能保障乘客和其它用路人的安全。情境式測試(Scenario-Based Testing)是用來驗證自駕車決策控制次系統的主要方法之一,包含IEEE Standards Association 也是以情境式測試為框架,研擬適用於自駕車決策控制系統的安全規範 IEEE P2846 (Formal Model for Safety Considerations in Automated Vehicle Decision Making)[1]。工研院機械所提出虛實整合框架開發自駕車安全驗證,結合虛擬測試 (Virtual testing) 與真實測試 (Real-world testing) 的優點,如圖1所示,加速自駕車規模化商業落地。
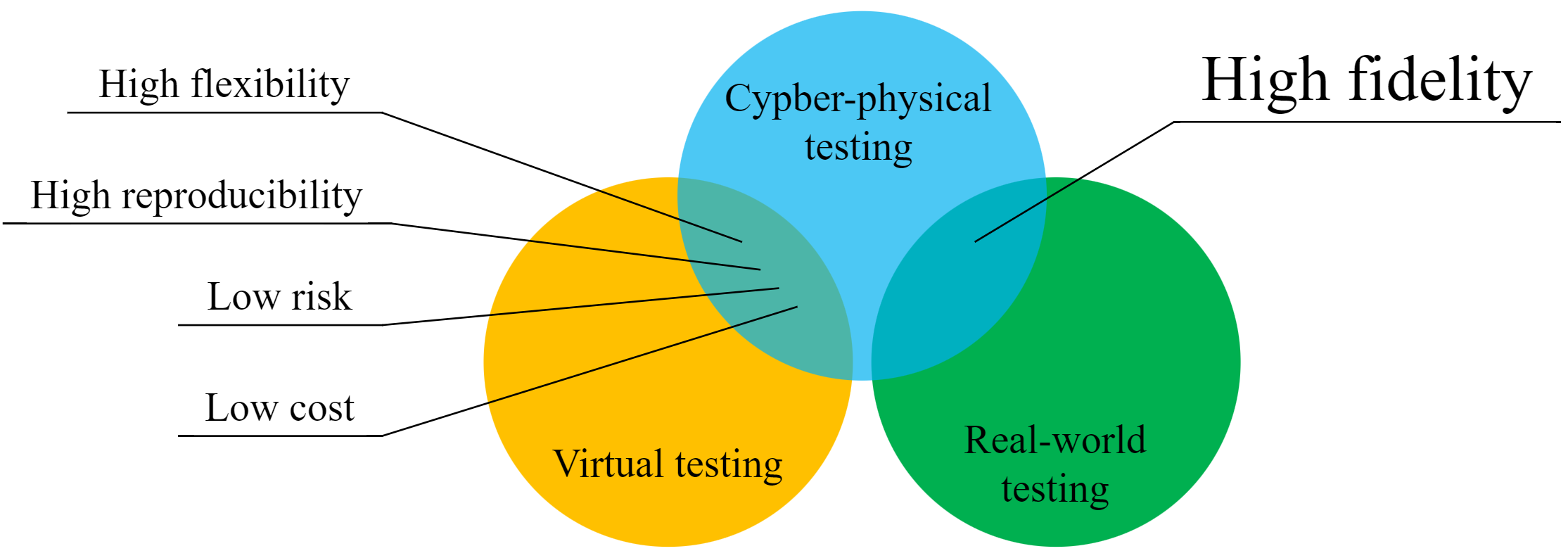
圖1 自駕車虛實整合安全驗證結合虛擬測試與實車測試的優勢,具有高擬真、高重現性、高彈性以及低成本和低風險等優點
我們提出的自駕車虛實整合安全驗證的目的是縮小虛擬和真實測試的數據差異,降低真實測試的次數。如圖2所示,我們提出的虛實整合框架利用以下技術特徵提昇虛擬交通情境的擬真程度 (Fidelity):(1) 所有的模組都是使用自駕車的高精地圖,移除交通環境差異,包含虛擬環境建置、交通情境生成與安全模型;(2) 我們使用真實量測的交通流參數設定微觀交通流模型,生成貼近真實路況的虛擬交通流:(3)應用混合實境車輛迴路 (Mixed-Reality Vehicle-in-the-Loop, MR-ViL)測試,如圖 3所示,去除自駕車動態模型的誤差。我們也引入Mobileye提出的RSS (Responsibility Sensitive Safety) 模型[2]量化驗證自駕系統決策控制命令的安全性。
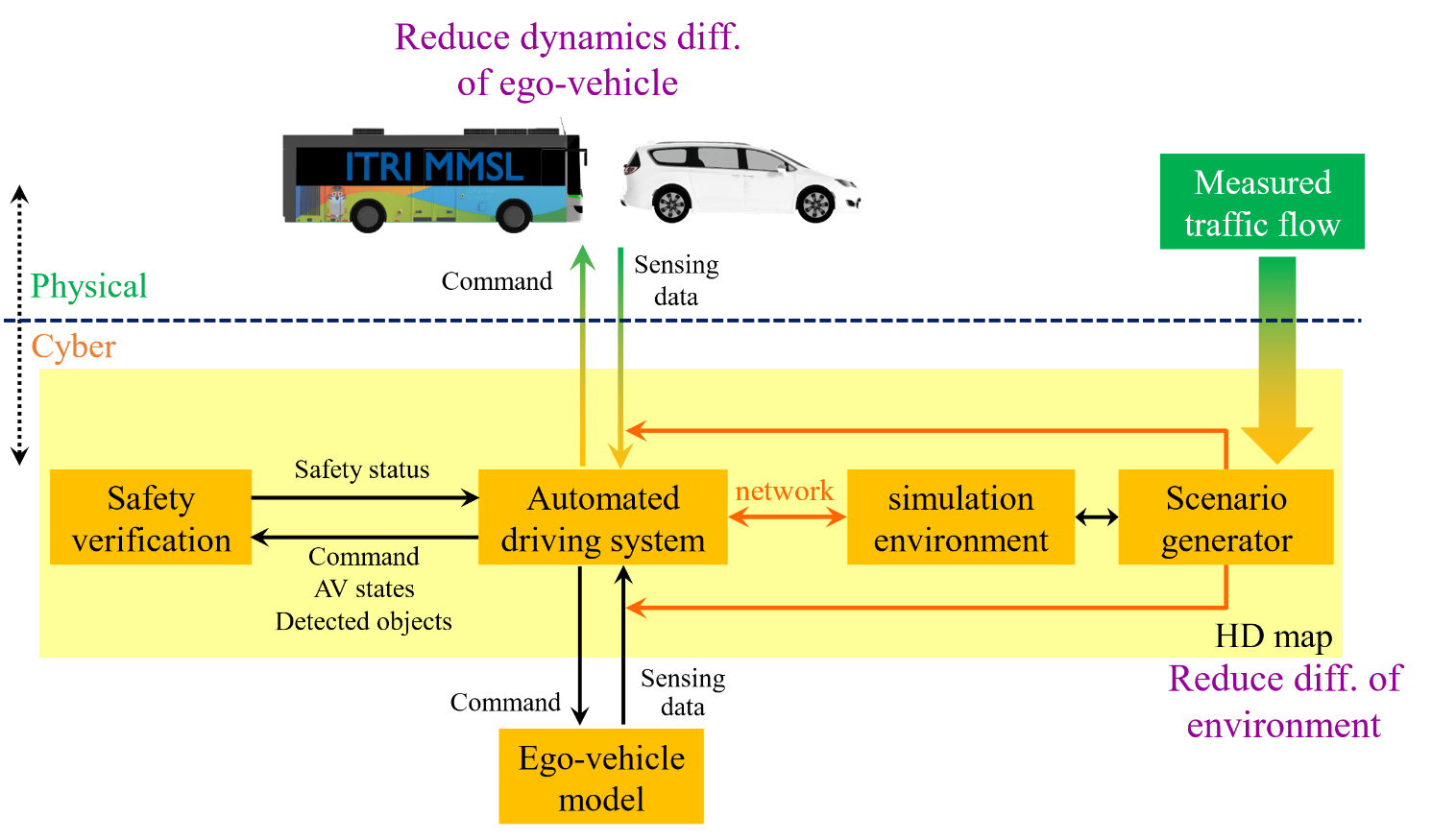
圖2 自駕車虛實整合安全驗證系統架構
…本文未結束
更完整的內容 歡迎訂購 2022年4月號 469期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購