聯網自駕聯結車澳洲高速公路亮相 : 應用示範解析
摘要:自2017 年起,澳洲公路運營商Transurban 便啟動自駕車在高速公路的試驗計畫。工研院自駕團隊的「全速域自駕車運行」和「智慧道路資訊融合」技術於2022 年引起了Transurban 的關注,並受邀前往澳洲墨爾本共同執行計聯網自駕聯結車應用示範。示範在墨爾本市中心外環的M1 高速公路上進行,總共行駛超過630 公里,且未發生任何自駕或人為肇始事故。此次合作展現了工研院自駕團隊在自駕車技術方面的優異成果,也為Transurban 提供了重要的數據和經驗,同時為澳洲和臺灣的自駕技術創造了新的里程碑,有助於產業和政府更好地準備自駕車技術的發展和應用。本文將對團隊技術如何通過安全審核和技術發現進行分享。
Abstract:The Transurban has been working on the highway CAV project since 2017. In 2022, the autonomous truck technologies of the Industrial Technology Research Institute (ITRI) attracted the attention of Transurban and were invited to jointly execute the Self-Driving Truck Demonstration in Melbourne. This demonstration was carried out on the M1 highway, covering a total of more than 630 kilometers without system or human-initiated accidents occurred. This collaboration demonstrated the outstanding achievements of the ITRI in autonomous technology and provided Transurban with important data and experience, while also creating new milestones for self-driving vehicle in Australia and Taiwan, helping the industry and government better prepare for the development and application of self-driving vehicle. The article will share how the team's technology passed
safety audits and the technical discoveries made.
關鍵詞: 自駕聯結車、澳洲高速公路、聯網自駕
Keywords : Self-Driving truck, Australia highway Trail, CAV
前言
隨著自駕車技術的不斷發展,各國政府持續鼓勵自駕車的應用和試驗,以探索自駕車對交通系統和基礎建設的影響。Transurban(以下簡稱TU)作為澳洲最大的公路營運企業,在2017 年起便啟動一系列自駕車在開放道路運行的試驗計畫,並致力於收集、分析自駕車的運行數據,以提供未來的交通政策和投資建議。工研院自駕團隊的「全速域自駕車運行」和「智慧道路資訊融合」的技術,經過在臺中、新竹、桃園等開放場域的實績,在2022 年得到TU 關注,並獲邀至澳洲墨爾本共同執行其計畫最後一階段的聯網自駕聯結車應用示範。本次應用示範自駕聯結車行駛於M1 高速公路,由鄰近港口的ToddRd 出發進入M1,通過墨爾本市中心外環,向東行駛到市郊 Warrigal Road 再返回。圖1 為示範路線示意圖,全程約40 公里,為墨爾本貨櫃運輸的必經幹道。聯結車將在指定車道與路段,開啟自駕系統並以時速80 公里行駛。車廂內依法規要求,由兩名專業聯結車教練分別擔任安全駕駛與道路觀察員,對行車狀況進行監控與評估,僅在必要的情況下介入操作。在本次應用示範中,自駕行駛累積超過630 公里的旅程,全程零自駕或人為肇始事故發生,並且得到了澳洲7 News、Channel9、Herald Sun 等各大媒體的報導和關注。
此次合作是澳洲首次在開放道路上進行聯結車全自駕的試驗,成功的應用示範,不僅展示了工研院自駕團隊在自駕車技術方面的優秀成果,也為TU 提供了重要的數據和經驗,以便產業和政府單位更好地準備自駕車技術的發展和應用,也同時為澳洲的交通與運輸產業和臺灣的自駕技術奠定了新的里程碑。本文將分成三個部分進行說明與分享。第一部分為聯結車款在自駕技術的挑戰,並對如何克服挑戰以實現更可靠的自駕聯結車進行說明。第二部分將概述維多利亞州道路自動駕駛許可的要求,並說明團隊自駕技術透過在澳洲封閉場域的安全評鑑,取得VicRoads 道路自駕許可證,最後將對本次澳洲聯網自駕聯結車實測進行說明。
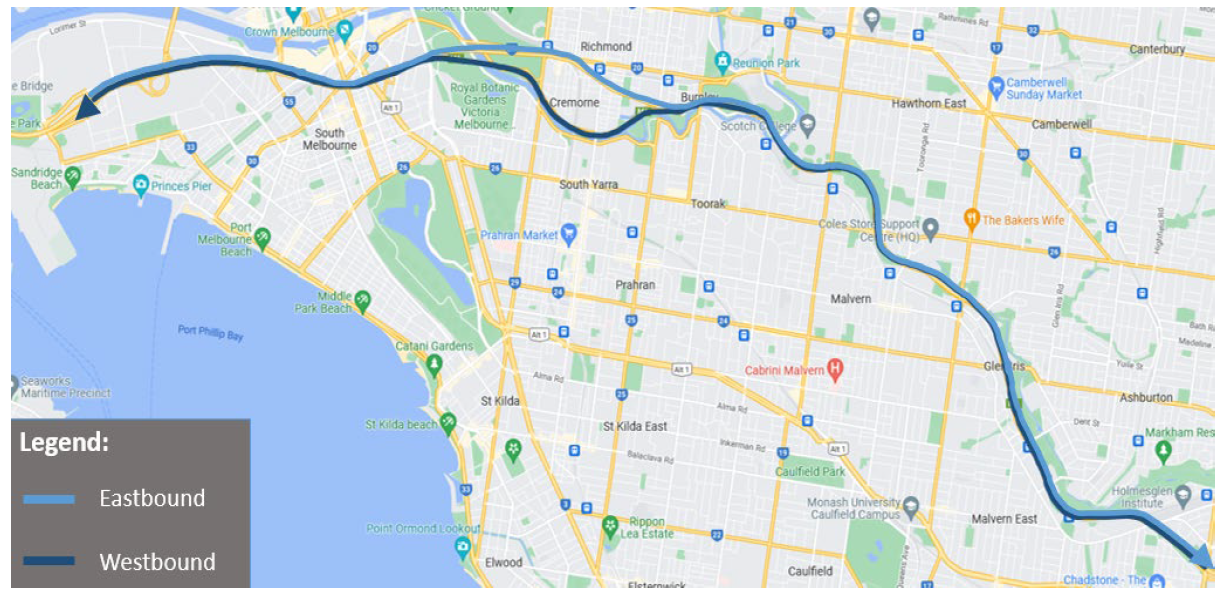
圖 1 示範路線示意圖
聯結車自駕技術,墨爾本M1高速公路運行
聯結車自駕技術的挑戰
跟一般車輛不同的是,聯結車在轉彎時板車與車頭的動態是分離的,若只考慮車頭去追尋彎道軌跡,則會讓板車太過偏離路徑,如圖2(a),若要讓板車維持在路徑上,則必須讓車頭以先延遲轉向再回正的特殊方式進行過彎,如圖2(b),且根據彎道程度的不同與入彎時板車與車頭的姿態差異,也會有不同程度的延遲時間與修正量,如此一來原本在一般車輛上,單純依據彎道程度給予對應比例的方向盤轉角的控制方法[1]不再適用,然而,同時要考慮多變因下的方向盤控制設計調配也相當困難,舉例來說,若要從不同程度的彎道、車頭姿態、板車姿態三種變因去交叉測試出適當的比例分配,最後計算出合適的方向盤角度,需要花費大量的時間,且設計出來的分配比例也難以保證包含到每一種過彎的情形。為了簡化複雜的系統,我們透過參考運動模型分析[2]得到了板車與車頭之間的運動關係,如圖3,檢視公式可以了解聯結車的幾種運動特性。1. 當車頭開始轉動時,板車跟車頭的夾角會先變大,然後漸漸驅動板車轉動,所以板車的轉動可以視為車頭轉動後的一個延遲反應,2. 當車頭轉動速度趨於穩定一段時間時,板車的轉動速度也會趨於穩定,此時板車與車頭夾角會變成定值,故可以推得當車頭轉越快時,其與板車之間的夾角也會越大,3. 當車頭從轉動變為直線前進時,板車的轉動速度會與兩者之間夾角一起慢慢變小,最後穩定時夾角為零,達到車頭與板車方向一致。在了解車頭與板車特性後,便可以使用公式預測給予什麼樣的方向盤後板車的運動軌跡會如何,當道路幾何已知時,我們可以套用最佳化方法設計每個時刻合適的方向盤轉角,讓板車移動的軌跡盡量與道路幾何重疊,即可讓板車精準的跟在設定的路線上。但是實際執行上,我們還缺少了一個重要的初始值去預測板車的動向,也就是車頭與板車之間的夾角,其影響為板車在一開始過彎時的姿態不同都會使其軌跡預測結果不同。考慮到效益問題,在板車上加裝感測器是不可行的作法,第一,聯結車不會一直使用同一個板車,再來就算所有板車都裝上了感測器去量測車頭與其之間的夾角,每次更換板車時都需要重新校正感測器,執行上增加難度。在這樣的條件限制下,我們透過現有的感測器裝置,如圖4車頭上的光達,找到一個快速可行的方法解決量測板車姿態問題。
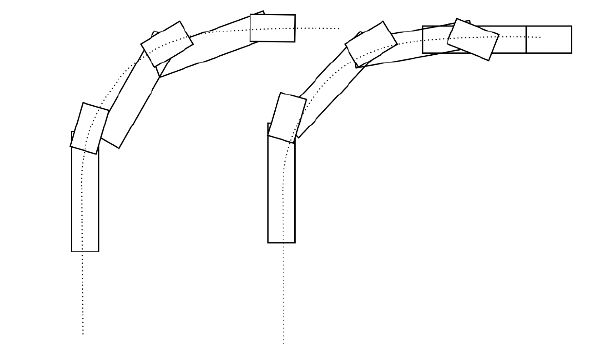
圖2 聯結車轉向示意圖(a)車頭在軌跡上導致板車產生極大內輪差(b)控制車頭延遲轉向也延遲將方向盤回正
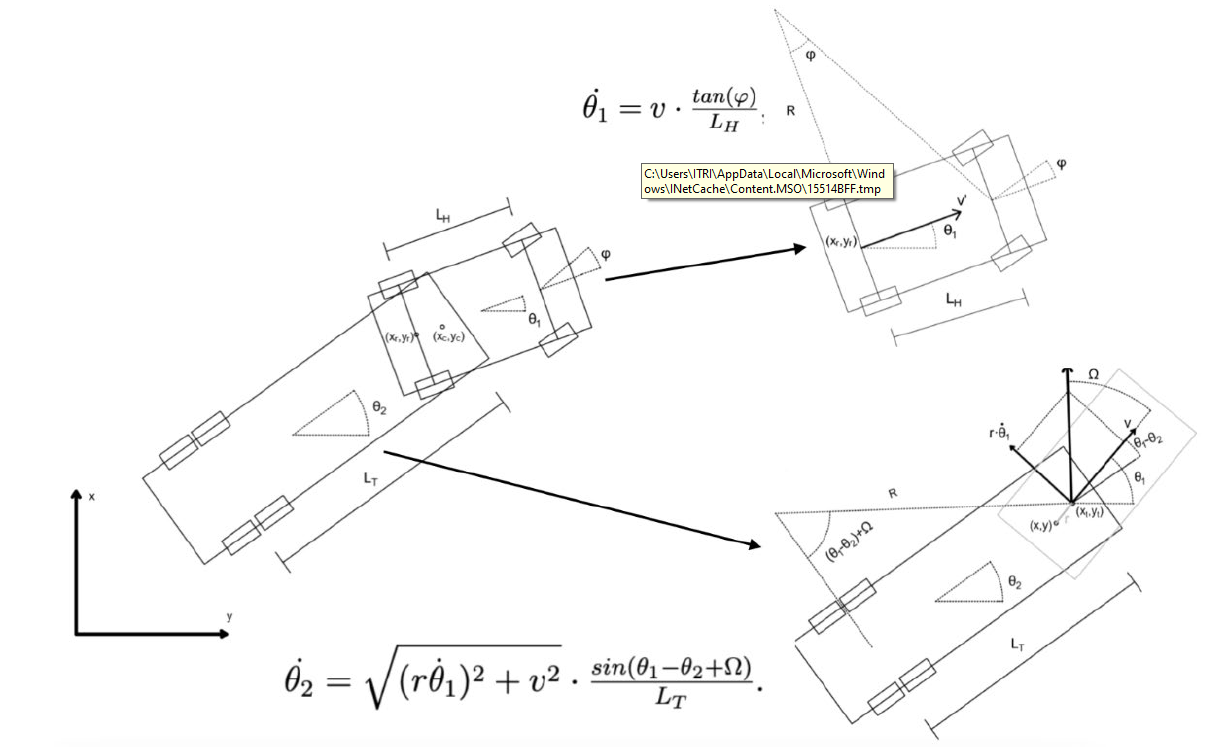
圖3 板車與車頭之間運動公式 [3]
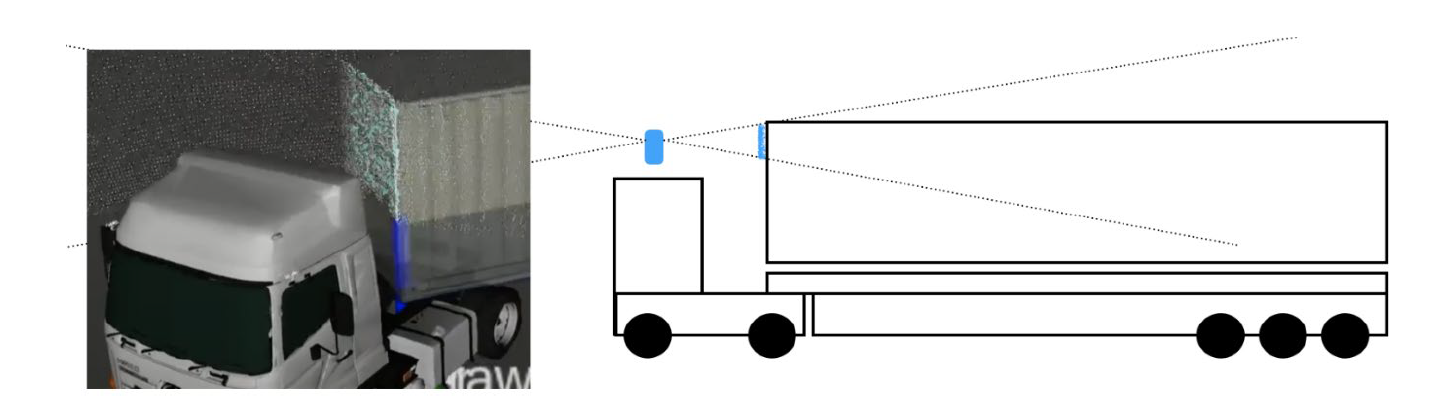
圖4 車頭頭頂光達打在貨櫃平面結果
…本文未結束
更完整的內容 歡迎訂購 2023年4月號 481期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購