自駕車用高精地圖快速製圖技術
作者:
Victor Lu (呂勝利)、林春榮、呂權周、吳俊德
刊登日期:2023/03/31
摘要:在自駕車、智慧城市應用中,高精地圖扮演相當關鍵的角色,它負責提供精確、豐富環境資訊。在實務應用上,高精地圖需要適時的更新及擴張以提供最新的環境資訊和應用範圍,但受限於高價的硬體設備及大量的人工作業流程,國內既有的圖資產製及更新流程速度緩慢,難以規模化。為達到快速更新及擴張需求,本團隊試圖評估低成本設備與半自動化的流程的綜合成效。因此,本團隊通過工研院機械所自製的低成本光達測繪設備來對桃園國際機場場域進行案例分析,並透過本文展示只使用國內測繪業者10% 成本的硬體設備及20% 的向量地圖產製時間,來建置自駕車用的高精地圖,並驗證本系統產生的圖資更新能符合內政部對於高精地圖的精度規範。透過這些成果,本團隊描繪一個建置臺灣高精地圖的願景,結合既有高成本且高精度的地圖產製流程與本文提出低成本快速建圖流程,一起協作創建出兼具精度與新鮮度並包覆全臺灣的高精地圖。
Abstract:HD maps provide rich, cm-accurate information about an environment that is crucial for self driving cars and other smart city applications. But efforts in Taiwan to expand HD map coverage and provide timely updates are severely limited by current map-making methods, due to reliance on high-cost equipments and manual workflows. This work evaluates the use of ITRI’s low-cost equipment and semi-automated workflows for accelerating HD map-making. We perform a case study, using ITRI's low-cost Lidar mapping system to create an HD map of Taoyuan International Airport.We show that at just 10% the equipment cost and 20% the vector map production time of current Taiwan mapping companies, ITRI's system can create high quality HD maps proven to work on self-driving cars and can also be used to provide highly accurate updates to existing HD maps (i.e. base map). Based on these results, we articulate a vision for HD mapping in Taiwan, where emerging low-cost mapping solutions collaborate alongside existing processes (high-cost but more accurate) to create an island-wide HD map that is both fresh and accurate.
關鍵詞:高精地圖、光達點雲、自駕車
Keywords:HD map, Lidar point cloud, Self driving cars
前言
高精地圖是自駕車、智慧道路、智慧城鄉等技術中不可或缺的一環。國內高精地圖的圖資內容與產製流程政府已陸續訂有規範 [1] [2],截至110 年止民間測繪業者已試驗建置完成17 個場域,總路長達120 公里。但是相較臺灣公路總長41,475 公里仍有很長的路要走。主要問題在於國內既有製圖流程仰賴昂貴硬體設備,且需要大量的人工作業,欠缺關鍵技術自主性,很難規模化。隨著自駕車等應用在國際市場的落地,高精地圖的需求也將隨之遽增,國產製圖技術若跟不上,除了錯失商機,還將面臨不得不由國外廠商來產製國內高精地圖的窘境。高精地圖的快速產製必須從兩個面向著手:數據收集、數據處理。兩者必須同時得到加速,整體速度才能提升,如圖1。1. 數據收集:掃圖車在場域繞行,記錄各種感測器數據(如光達、相機影像、IMU、GNSS)。測量人員進行實地控制點量測。由於掃圖車及測量人員一天能收集的數據量有一定上限,這面向的加速勢必仰賴多台掃圖車,多區同時進行。而多台掃圖車佈署,需要足夠低成本的測繪設備。2. 數據處理:人工標註、自動化工具等方式,將原始感測器數據轉化成符合目標應用的高精地圖。這部分的加速需要更有效率的自動化工具,取代耗時的人工作業步驟。此外,由於上述低成本設備的使用,需要更強健的數據處理方法,以適應低成本設備較大的誤差及雜訊。為了突破國內高精地圖產業現在在數據收集與數據處理兩方面的效率瓶頸,工研院機械所自駕車團隊近年投入研發高精地圖技術,如後述,這包含了低價掃圖設備、點雲處理軟體、自動化
標記工具等技術。本文將對這些技術作介紹,並對其產生的高精地圖進行品質、成本、時效等面向的驗證與效益分析,以證明工研院技術在未來快速製圖應用的可行性。本文內容主要描述我們在內政部「111 年度自駕車用高精地圖快速製圖策略研究案」的成果,更多詳情可從政府研究資訊系統(GRB)下載參閱該案報告書。
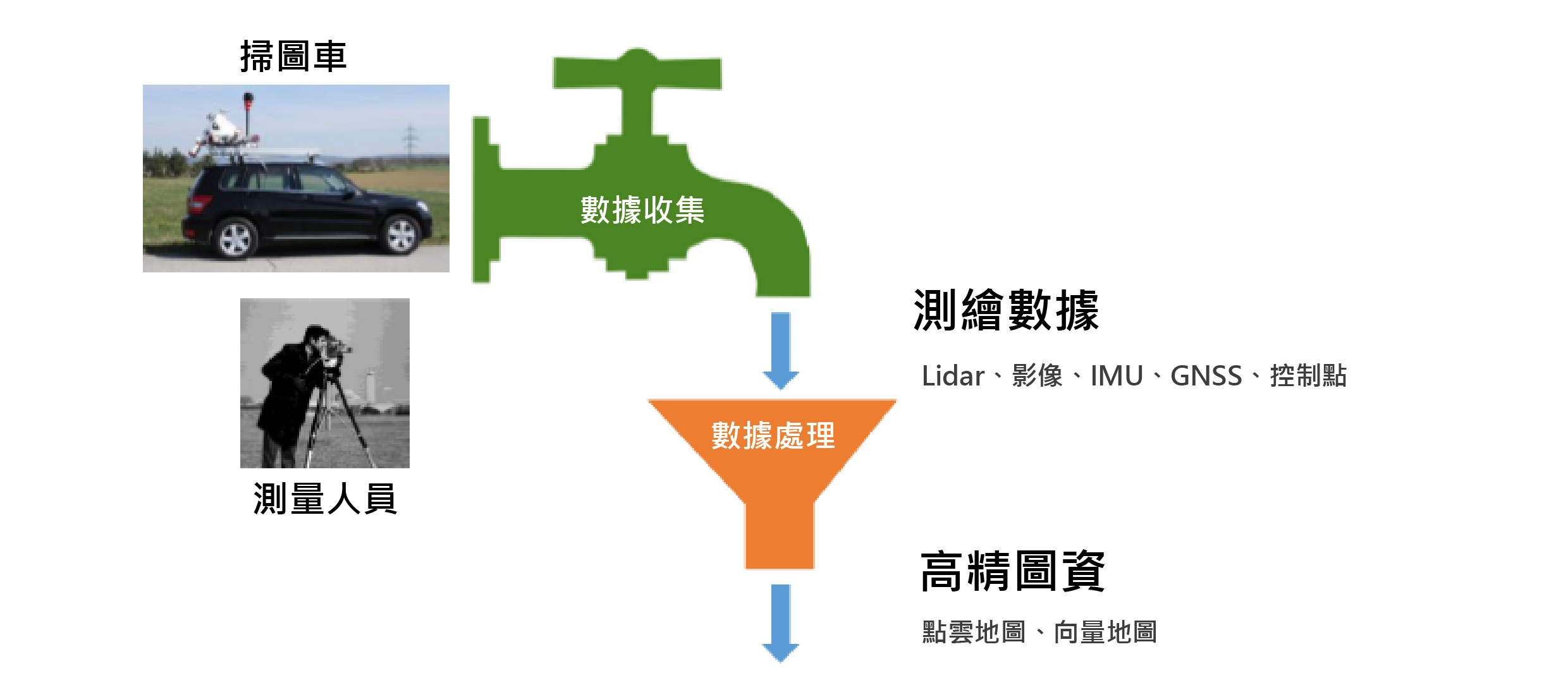
圖 1 高精地圖的快速產製需要同時加速數據收集與數據處理
地圖更新率 vs 設備成本
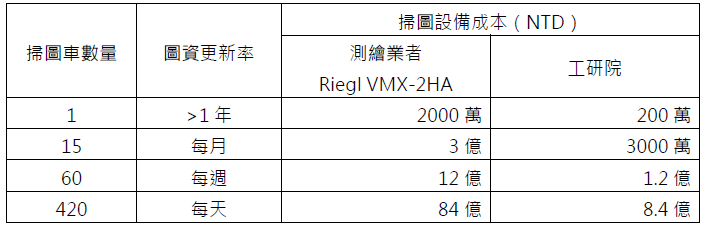
我們以簡化計算,說明掃圖設備成本對於圖資更新率的重要性,如表 1。目前國內測繪業者普遍使用的Riegl VMX-2HA 測繪設備,一套約2000萬台幣。假設臺灣公路總長為41475 公里[3],市區道路開車8 小時(1 工作天) 行駛里程約100 公里,則需>1 年(414.75 天),全臺灣才能完全掃描一次。若利用15 台掃圖車,多區同時進行掃瞄作業,則可以在一個月內將全臺灣完全掃描一次( 一個月的更新率),其設備成本為3 億台幣(15×2000萬)。以此類推,若想要每週的更新率,則需要60台掃圖車,測繪設備成本為12 億(60×2000 萬)。若想要每天的更新率,則需要420 台掃圖車,測繪設備成本為84 億(420×2000 萬)。以上分析未考慮許多因素。每天行駛里程會因區域平均車速而有所差異。另外,一條路幾乎一定會被行駛多次:可能是為了達到一定的點雲密度、可能是為了避免因單趟遮蔽而缺少部分場景的點雲、又可能是無法避免重駛同一條路,因此實際所需要的里程或許會是公路總長的好幾倍。儘管不嚴謹,上述分析無疑帶出一個嚴重的問題:若想以國內既有方式利用昂貴設備進行快速製圖,將面臨設備成本居高不下的問題。
表1 掃圖設備成本 vs. 圖資更新率
…本文未結束
更完整的內容 歡迎訂購 2023年4月號 481期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購