考量交管邏輯之移載機器人分派研究與數位孿生應用
作者:
陳建良、陳子立、戴天吟、邱冰瑩、林宜靜、王俊勝
刊登日期:2023/08/01
摘要:隨著工業4.0和智慧製造的普及,多移載機器人系統(Multiple Autonomous Mobile Robot System)被廣泛應用於各個場域。另外,在智慧工廠的建設中,數位孿生(Digital Twin)扮演的角色也越來越重要。透過結合數位孿生和移載機器人(Autonomous Mobile Robot, AMR),可以建立一個虛擬的工廠模型,模擬AMR的運行路徑和行為。本文首先探討了AMRs常見的交通問題和解決方法,以及蒐集數位孿生的應用和方法。接著,以半導體封裝廠為例,使用模擬軟體實現數位孿生,探討不同的分派規則對系統的影響,並針對結果進行分析。
Abstract:With the widespread adoption of Industry 4.0 and smart manufacturing, Multiple Autonomous Mobile Robot System have been extensively used in various fields. In addition, the role of Digital Twin technology in the construction of smart factories has become increasingly important. By integrating digital twin and AMRs, a virtual factory model can be established to simulate the operation paths and behaviors of AMRs. This article first discusses common traffic problems and solutions in AMR systems, as well as the collection of applications and methods of digital twins. Then, using a semiconductor testing and packaging factory as an example, the digital twin is implemented using simulation software to investigate the impact of different dispatching rules on the system, followed by analysis of the results.
關鍵詞:多移載機器人系統、交管邏輯、數位孿生
Keywords:Multiple Autonomous Mobile Robot System, Traffic control logic, Digital twin
前言
近年來,隨著工業4.0的快速發展,物聯網、大數據、人工智慧等科技逐漸普及並應用在工業領域。在自動化物料搬運系統中,移載機器人(Autonomous Mobile Robot, AMR)已成為不可或缺的重要角色。尤其是在要求無塵等級的半導體封裝測試廠中,AMR可高效、準確地搬運晶圓盒,減少人工操作對產品的汙染風險,同時提高產線的自動化程度與生產效率。然而,在多移載機器人系統中,常常面臨交通堵塞、車輛調度等挑戰,因此需考量交管邏輯來進行AMR之分派,以提升整體系統效能。為了確保交管邏輯之有效性與準確性,數學模型與模擬軟體的建立與應用成為必要之研究課題。本文旨在探討相關文獻之做法,並透過建立數學模型與應用數位孿生(Digital Twin)技術,將其應用於實例中進行AMR分派路徑規劃,同時驗證所建立之數學模型之有效性,期望能提供產業界實用之參考。
考量交管邏輯之AMR分派研究
本文將探討多移載機器人系統中的交管邏輯,以及如何優化分派策略,提高運輸效率。AMR是一種具有先進自主導航能力的智能運輸設備,因其高彈性與高效率,被廣泛應用於倉庫物流、生產製造等領域。當多台AMR在同一場域運行時,交通管理變得至關重要。本文將介紹幾種常見之AMR碰撞(Collision)與死鎖問題(Deadlock),並分析相關研究方法,探討如何利用交通管理策略最大限度地提高多移載機器人系統的效率和安全性。
- 研究現況
考量交管邏輯之AMR分派規劃已成為一個廣泛存在的研究熱點。在此背景下,研究人員已經開始關注AMR可能遭遇的各種交通管理挑戰,包括碰撞和路線死鎖等問題。本節將分別針對碰撞和死鎖等問題以及其解決方法進行介紹。
(1) AMR碰撞問題
碰撞通常發生在兩台AMR在相同路徑段上移動時,不論是相同或相反的方向,或者朝著兩個正相交路徑的交匯處移動。碰撞最常發生於交叉路口、狹窄通道或突然轉彎的地方。我們可以通過使用感測器、避免碰撞策略和演算法來解決所述問題。
面對面碰撞一般較常發生當兩台AMR在相同的路徑段上的兩端朝彼此移動之時,因兩台AMR朝反方向移動,從而導致AMR發生面對面之碰撞問題,如圖1(a)所示。由於AMR具有一定的速度和負載,碰撞往往會導致嚴重的損壞和生產中斷。我們可以通過考量系統設計、控制策略和路徑規劃等方面,來解決面對面碰撞問題,例如使用動態區域策略(Dynamic Zone Strategy)、鏈式預約協調方法(Chain-Based Appointment Coordination Method)等。
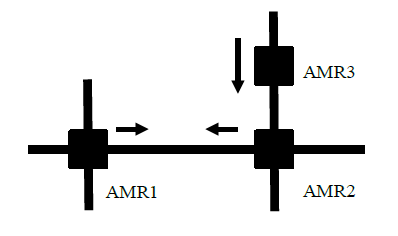
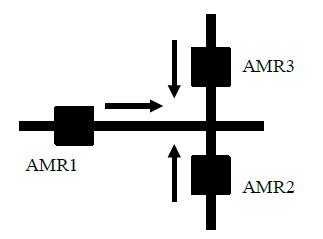
交叉碰撞是多移載機器人系統中最常見的安全問題之一。交叉碰撞是指在AMR搬運過程中,當不同的AMR從不同的路徑進入同一個十字路口時,彼此之間相撞的情況,如圖 1 (b)所示。此類碰撞問題通常發生在處理高速搬運的場合,並且可能導致嚴重的AMR損壞狀況,同時導致生產中斷。為了解決此類碰撞問題,研究人員提出了許多方法,包括基於動態路徑選擇(Dynamic Route Selection)的方法、基於路徑規劃(Path-based)的方法、基於虛擬網格(Virtual Grid-based)的方法、基於物理限制(Physical Constraints-based)的方法和基於時序控制(Time-based Control)的方法等。這些方法中,基於動態路徑選擇的方法通常被認為是最有效的,因為它可以實時根據AMR的狀態進行路徑選擇和調整,以減少碰撞的發生。然而,其他方法也都具有自己的優點和局限性,需要根據具體應用場景和系統需求進行選擇和優化。
停滯碰撞是指當一輛AMR在移動時,另一輛AMR停留在它的行進路線上,從而阻礙其前進,如圖 1 (c)所示。這類碰撞通常在停止或開始行駛時發生,雖然所導致的傷害較小,但仍會影響AMR的效率。這類碰撞發生的原因是因為多移載機器人系統路徑規劃的算法失誤或AMR運動控制系統故障所導致的。為了避免停滯碰撞,我們需要在系統中進行碰撞檢測和避免策略,以確保所有AMRs都能夠在最短的時間內平穩地完成任務。
- 節點佔用碰撞(Node-Occupancy Collision)
在AMRs的移動過程中,如果有兩個或多個AMRs同時到達同一個節點,就會產生節點佔用碰撞,如圖 1 (d)所示。這類碰撞一般是因為AMRs之間的通訊問題或誤差引起的。對於單個AMR,它會視該節點是否被佔用,而做出相應的決策。但是,在多個AMRs同時到達該節點的情況下,就需要協調所有AMRs的行動,以避免碰撞的發生。如果發生節點佔用碰撞,AMRs可能會被迫停止或重定向,導致工作進度延誤或產生其他問題。因此,有效的碰撞預防策略需要考慮到節點佔用碰撞的可能性。
(2) AMR死鎖問題
死鎖問題發生在多台AMRs爭奪同一路徑段上的同一空間時,例如因為一個空間只能容納一台車,由於每台車都必須要佔據另一台車目前所佔據的位置,並且它們只能在獲得下一個空間時才能釋放當前空間,因此沒有一台車可以再繼續移動。死鎖問題表示系統中出現一個或多個同時之進程因為進程對資源的請求永遠無法得到滿足而被永久阻塞。以下介紹幾種常見之AMR死鎖問題。
- 跨車道死鎖(Cross Lane Deadlock)
跨車道死鎖問題是指兩台AMRs同時想要交換行駛軌道,但彼此相互阻礙,從而導致交錯死鎖的狀態,如圖 2 所示。這種死鎖問題通常是由於交換軌道需要AMR在特定的時間進行,當兩台AMRs同時想要交換軌道時,就會產生衝突,使兩台AMRs陷入無限循環的狀態。解決這種問題的方法包括重新規劃AMR的軌道,使它們在交錯點之前進行軌道交換,或者使用中央控制器來協調交換軌道的時間,以防止兩台AMRs同時進行軌道交換。
AMR的區域死鎖問題又稱為車輛卡住問題,是指當AMR在一個有限的區域內進行搬運任務時,由於車輛運行路徑的交錯、阻塞等因素,導致車輛無法順利通過,進而影響整個區域的運輸效率,形成死鎖現象,如圖 3 所示。
循環死鎖是指當有多台AMRs在工廠內運行時,若它們在搬運任務中需要進行繞路或輪流等待時,容易發生循環等待的情況,導致所有AMRs都無法前進,形成死鎖狀態,如圖 4 所示。通常,此類死鎖問題發生在存在多條線路和交叉路口的場景中,因為這些場景需要對AMR的運動進行更複雜的協調和控制,以避免交通阻塞和循環死鎖的發生。
(a) (b)


(c) (d)
圖 1、碰撞問題示意圖 (a)面對面碰撞 (b)交叉碰撞 (c)停滯碰撞 (d)節點佔用碰撞
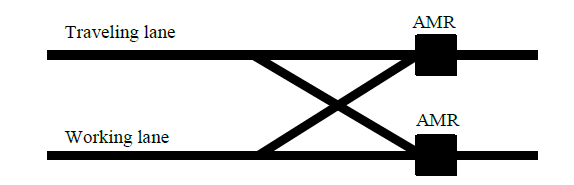
圖 2 跨車道死鎖示意圖
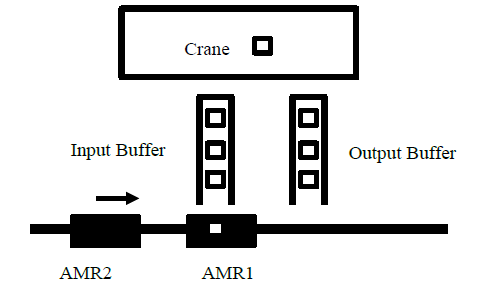
圖 3 區域死鎖示意圖
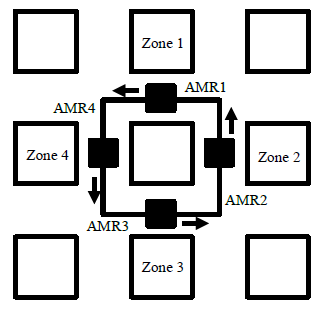
圖 4 循環死鎖示意圖
…本文未結束
更完整的內容 歡迎訂購 2023年8月號 485期
機械工業雜誌‧每期240元‧一年12期2400元
我要訂購